PROJECTS
stevanussatria.com
HTML | CSS | WordPress
What better time to complete the migration of my portfolio website from WordPress.com to WordPress.org, than the quarantine period during the COVID19 pandemic. After a month-long of looking for a suitable parent theme, designing the homepage, adding content pages, ensuring its responsiveness, and inserting custom CSS to boost the site’s look-and-feel, the revamped stevanussatria.com went live in the middle of May 2020!

Figma Plugins
HTML | CSS | TypeScript
A collection of open-source plugins for the popular cloud-based design tool Figma. Each was code in TypeScript utilizing the API provided by the Figma Team. The repository was also configured with a linter (ESLint), a formatter (Prettier), and a CI tool (Travis CI).

BRÜ-ME
Electronics | IoT | Basic Wiring
A fun attempt at making an unassuming drip coffee maker smarter by connecting it to a WiFi switch, all without breaking the bank. The device is controllable by voice as well as via the Google Home app. The total cost of this project sums up to merely S$16. Until today, BRÜ-ME is still my trusty go-to coffee maker.

Lumos
3D Modeling | 3D Printing | Basic Wiring
A dent on my beloved Antuna longboard inspired this 3D printing project. Designed to protect the board from more head-on collisions, it is equipped with a 5V LED strip which provides visibility for oncoming vehicles when longboarding at night.
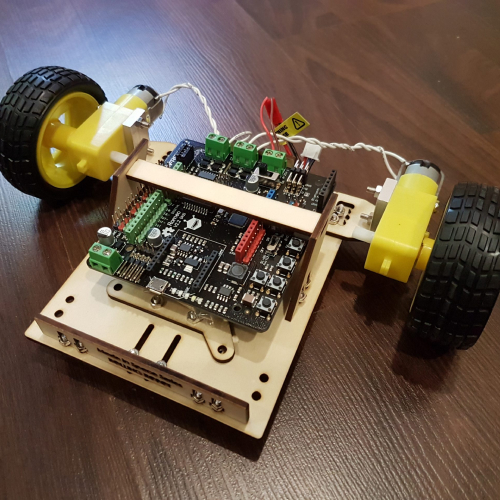
RoverBot
3D Modeling | Rapid Prototyping | Arduino Programming
Designed for the “Rolling Robots” Workshop conducted at the ArtScience Museum in 2017, RoverBot was a simple differential drive robotic kit with basic customizability built into it. The aim was to give participants a taste in making design choices when building the kit from the ground up.

ZOUBA
Rapid Prototyping | Power Electronics | Structures and Mechanics
The product of an 8-month long final year project, ZOUBA was designed in collaboration with Gilmour Space Technologies. The main aim was to come up with a personal electric vehicle that is portable enough to fit into a bag. What we came up with was a 3-wheeler with a hinge-based folding mechanism and a detachable handle to achieve portability without sacrificing stability.
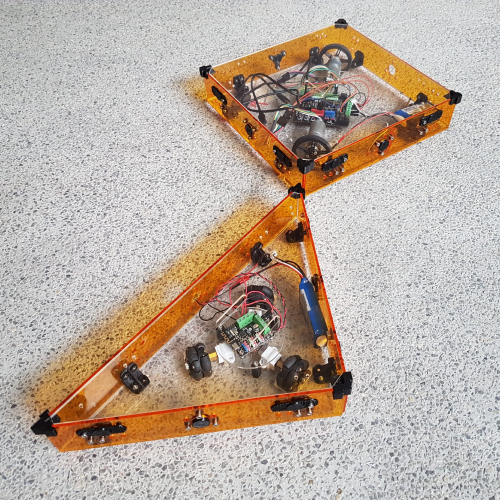
Mod-Bot
3D Modeling | Rapid Prototyping | Arduino Programming
A proof-of-concept built as part of my coursework, Mod-Bot comprised 2 mini-robots that can be joined via magnetic forces. Extending this concept to more than 2 sub-units opens up numerous configurations when deployed as a single large unit, as well as swarm deployment when utilized as multiple sub-units.

SALAMANDER
Drivetrain Design | Waterproofing | Wireless Control
SALAMANDER was a coursework turned research project. Designed for surveillance and reconnaissance, it featured a two-axis pendulum mechanism in a 155mm-diameter spherical shell. It was equipped with 2 wireless streaming cameras and a waterproof 3D-printed rubberized sleeve that also provided extra traction both land and water. SALAMANDER’s design as a portable amphibious robot attracted international interest; it was featured in both Discovery Canada’s Daily Planet and Maker Faire European Edition 2015.

Velox
Power Electronics | 3D Modeling | Rapid Prototyping
Equipped with a 270kv brushless DC motor and wireless RC parts meant for remote-controlled mini-buggy, Velox’s unique selling point was its fully 3D-printed motor mount. It was capable of reaching up to 28km/h, was portable enough to carry in one-hand, and became the go-to mode of transport around campus for the rest of my undergraduate years. Oh, and did I mention that I was also the first DIY electric skateboard on-campus that subsequently inspired others to build their own versions?

Troll Kart
Power Electronics | 3D Modeling | Structures and Mechanics
The end product of the 10-week long Summer Program at MIT, the word “troll” was added into the go-kart we built because we miscalculated the legroom and ended up having to mount our pedal on the handle instead! Nonetheless, the beast ended up topping the maximum speed chart, and performed quite well in the races on the final day despite some reliability issues, mostly on the left front axle. It was the learnings from building Troll Kart that made Velox such a reliable machine for daily commuting.
Quadwalker
3D Modeling | Rapid Prototyping | Circuits and Electronics
Quadwalker was designed with the aim of improving the safety of walking sticks. We hypothesized that the loss of support when a user moves a walking stick forward poses significant risk should he/she loses balance while doing so. Hence the idea of prototyping a motorized attachment that fits most walking sticks. When pressed down, the circuit breaks the electricity flow and stops the motor, and when slightly lifted the motor will move the stick forward. As the stick is always on-ground, a user can quickly and safely lean on it should he/she suddenly loses balance.
stevanussatria.com
HTML | CSS | WordPress
What better time to complete the migration of my portfolio website from WordPress.com to WordPress.org, than the quarantine period during the COVID19 pandemic. After a month-long of looking for a suitable parent theme, designing the homepage, adding content pages, ensuring its responsiveness, and inserting custom CSS to boost the site’s look-and-feel, the revamped stevanussatria.com went live in the middle of May 2020!
Figma Plugins
HTML | CSS | TypeScript
A collection of open-source plugins for the popular cloud-based design tool Figma. Each was code in TypeScript utilizing the API provided by the Figma Team. The repository was also configured with a linter (ESLint), a formatter (Prettier), and a CI tool (Travis CI).
BRÜ-ME
Electronics | IoT | Basic Wiring
A fun attempt at making an unassuming drip coffee maker smarter by connecting it to a WiFi switch, all without breaking the bank. The device is controllable by voice as well as via the Google Home app. The total cost of this project sums up to merely S$16. Until today, BRÜ-ME is still my trusty go-to coffee maker.

Lumos
3D Modeling | 3D Printing | Basic Wiring
A dent on my beloved Antuna longboard inspired this 3D printing project. Designed to protect the board from more head-on collisions, it is equipped with a 5V LED strip which provides visibility for oncoming vehicles when longboarding at night.
RoverBot
3D Modeling | Rapid Prototyping | Arduino Programming
Designed for the “Rolling Robots” Workshop conducted at the ArtScience Museum in 2017, RoverBot was a simple differential drive robotic kit with basic customizability built into it. The aim was to give participants a taste in making design choices when building the kit from the ground up.

ZOUBA
Rapid Prototyping | Power Electronics | Structures and Mechanics
The product of an 8-month long final year project, ZOUBA was designed in collaboration with Gilmour Space Technologies. The main aim was to come up with a personal electric vehicle that is portable enough to fit into a bag. What we came up with was a 3-wheeler with a hinge-based folding mechanism and a detachable handle to achieve portability without sacrificing stability.
Mod-Bot
3D Modeling | Rapid Prototyping | Arduino Programming
A proof-of-concept built as part of my coursework, Mod-Bot comprised 2 mini-robots that can be joined via magnetic forces. Extending this concept to more than 2 sub-units opens up numerous configurations when deployed as a single large unit, as well as swarm deployment when utilized as multiple sub-units.

SALAMANDER
Drivetrain Design | Waterproofing | Wireless Control
SALAMANDER was a coursework turned research project. Designed for surveillance and reconnaissance, it featured a two-axis pendulum mechanism in a 155mm-diameter spherical shell. It was equipped with 2 wireless streaming cameras and a waterproof 3D-printed rubberized sleeve that also provided extra traction both land and water. SALAMANDER’s design as a portable amphibious robot attracted international interest; it was featured in both Discovery Canada’s Daily Planet and Maker Faire European Edition 2015.
Velox
Power Electronics | 3D Modeling | Rapid Prototyping
Equipped with a 270kv brushless DC motor and wireless RC parts meant for remote-controlled mini-buggy, Velox’s unique selling point was its fully 3D-printed motor mount. It was capable of reaching up to 28km/h, was portable enough to carry in one-hand, and became the go-to mode of transport around campus for the rest of my undergraduate years. Oh, and did I mention that I was also the first DIY electric skateboard on-campus that subsequently inspired others to build their own versions?

Troll Kart
Power Electronics | 3D Modeling | Structures and Mechanics
The end product of the 10-week long Summer Program at MIT, the word “troll” was added into the go-kart we built because we miscalculated the legroom and ended up having to mount our pedal on the handle instead! Nonetheless, the beast ended up topping the maximum speed chart, and performed quite well in the races on the final day despite some reliability issues, mostly on the left front axle. It was the learnings from building Troll Kart that made Velox such a reliable machine for daily commuting.
Quadwalker
3D Modeling | Rapid Prototyping | Circuits and Electronics
Quadwalker was designed with the aim of improving the safety of walking sticks. We hypothesized that the loss of support when a user moves a walking stick forward poses a significant risk should he/she loses balance while doing so. Hence the idea of prototyping a motorized attachment that fits most walking sticks. When pressed down, the circuit breaks the electricity flow and stops the motor, and when slightly lifted the motor will move the stick forward. As the stick is always on-ground, a user can quickly and safely lean on it should he/she suddenly loses balance.